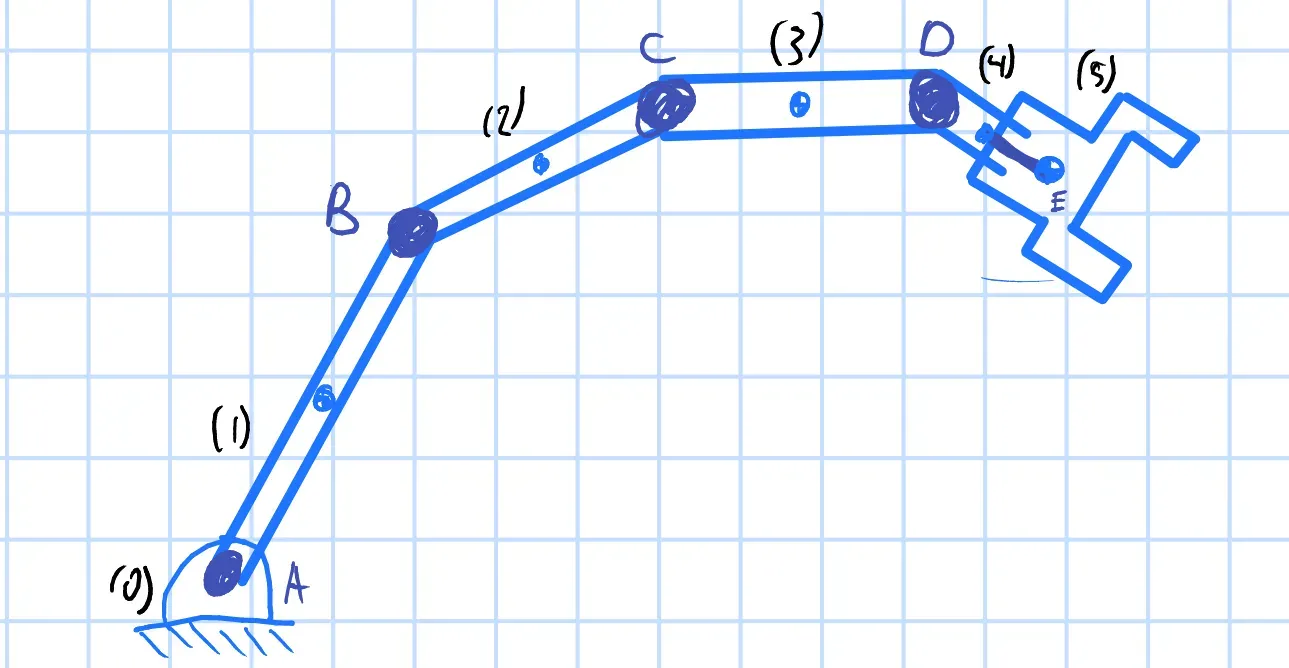
Simulating a robotic arm in 2D and 3D to test kinematic controller designs.
Draws a lot of content from my other project on Planar Mulitbody Dynamics where I developed general purpose 2D simulations.
The goal here is to create efficient 2D and 3D simulations in order to model a controller for the robotic arm.
Note 01.08.2025: The current prototype gives nonsense results and there isn’t much else, but I will be working on it in the next few weeks. Have fun watching along!
🔧 Current Features
- Basic 2D kinematic simulation using the body coordinate formulation
📦 Requirements
- MATLAB R2018b or later
- Symbolic Math Toolbox
🚧 Future Work
- 2D: Implementation of kinetic analyses (e.g., forward and inverse dynamics) + Animations
- 3D: Implementation of kinematic and kinetic analysis in Simscape and/or PyBullet
📚 References
NIKRAVESH, Parviz. Planar Multibody Dynamics: Formulation, Programming with MATLAB®, and Applications. CRC Press, 2007.