Development
I tested out using syms with the NR logic:
%% Reset
clear; % resets all the variables since syms can be a bit fucky wucky
%% Equations
m = 2; % number of variables
syms x [m 1] % syms variable array
% syms F(x) % syms function definition
F(x) = [-2*cos(x1)+3*cos(x2);10*sin(x1)+15*sin(x2)-18]; % function array (test from Num Math Chp 6)
D = jacobian(F,x); % Jacobian matrix
%% Parameters
% x_in = input('What is your guess?'); % intial guess
x_in = [0.59;0.99];
n = 0; % number of steps
n_max = 10; % step timeout
tol = 1e-15; % tolerance for successful zero
%% Solving
x_sol = zeros([m 1]);
x_sol = x_in; % setting the initial guess
f_out = subs(F,x,x_sol(:,1)); % evaluating the inital guess function value
df_out = subs(D,x,x_sol(:,1)); % evaluating the inital guess jacobian value
ep = sum(double(f_out)); % error
while (abs(ep)>=tol) && (n<n_max)
x_sol(:,n+2) = x_sol(:,n+1) - (inv(df_out) * f_out); % NR Method multivariable
f_out = subs(F,x,x_sol(:,n+2)); % update function value
df_out = subs(D,x,x_sol(:,n+2)); % update jacobian
ep = sum(double(f_out)); % update the error
n = n+1;
end
x_out = vpa(x_sol)
Then I developed this NR function script for ease of use:
function [n,xout] = NRfunc(F,x,x_in,tol,n_max)
D = jacobian(F,x); % Jacobian matrix
x_sol = x_in; % setting the initial guess
n = 0; % number of steps
f_out = subs(F,x,x_sol(:,1)); % evaluating the inital guess function value
df_out = subs(D,x,x_sol(:,1)); % evaluating the inital guess jacobian value
ep = sum(double(f_out)); % error
while (abs(ep)>=tol) && (n<n_max)
x_sol= x_sol - (inv(df_out) * f_out); % NR Method multivariable
f_out = subs(F,x,x_sol); % update function value
df_out = subs(D,x,x_sol); % update jacobian
ep = sum(double(f_out)); % update the error
n = n+1; % update the steps
end
xout = vpa(x_sol); % send output
end
Here is the function used with the four bar linkage:
%% System Parameters
a = 2.0;
b = 0.5;
l1 = 1.0;
l2 = 3.0;
l3 = 2.2;
m = 3;
syms t
syms O [m 1]
%% Equations
phi(O) = [l1*cos(O1)+l2*cos(O2)+l3*cos(O3)-a; ...
l1*sin(O1)+l2*sin(O2)+l3*sin(O3)-b;...
O1-pi/2];
%% Solution Parameters
O_in = [pi/2;0.4;0.6]; % initial guess
n_max = 10; % max steps
tol = 1e-15; % tolerance for successful zero
%% Solution
[n,xout] = NRfunc(phi,O,O_in,tol,n_max);
fprintf("In %d steps\n",n)
disp(xout)
Not working, not sure why. Gonna try hard coding it in.
I noticed the computations and conversions between syms and double are what are causing the long wait time.
I also tried using fsolve to check my answers:
%% Parameters
a = 2.0;
b = 0.5;
l1 = 1.0;
l2 = 3.0;
l3 = 2.2;
%% Equations
phi = @(O)([l1*cos(O(1))+l2*cos(O(2))+l3*cos(O(3))-a; ...
l1*sin(O(1))+l2*sin(O(2))+l3*sin(O(3))-b; ...
O(1)-pi/2]);
%% Solving using NR Multivariable Method (fsolve)
theta0 = [pi/2;0.58;1.3]; % initial guess
fsolve(phi,theta0)
I also attempted to solve it analytically https://de.mathworks.com/help/symbolic/solve-a-system-of-algebraic-equations.html
%% System Parameters
a = 2.0;
b = 0.5;
l1 = 1.0;
l2 = 3.0;
l3 = 2.2;
m = 3;
syms t
syms O [m 1]
%% Equations
phi = [l1*cos(O1)+l2*cos(O2)+l3*cos(O3)-a==0; ...
l1*sin(O1)+l2*sin(O2)+l3*sin(O3)-b==0;...
O1-pi/2==0];
%% Solution
S = solve(phi,O);
num_sol_1 = double([S.O1(1);S.O2(1);S.O3(1)])
num_sol_2 = double([S.O1(2);S.O2(2);S.O3(2)])
Sources
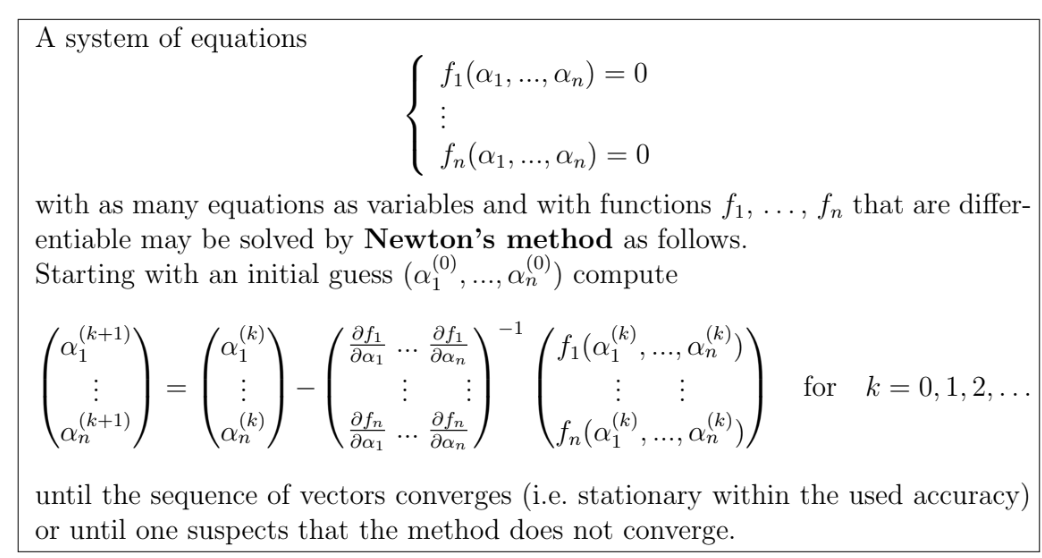
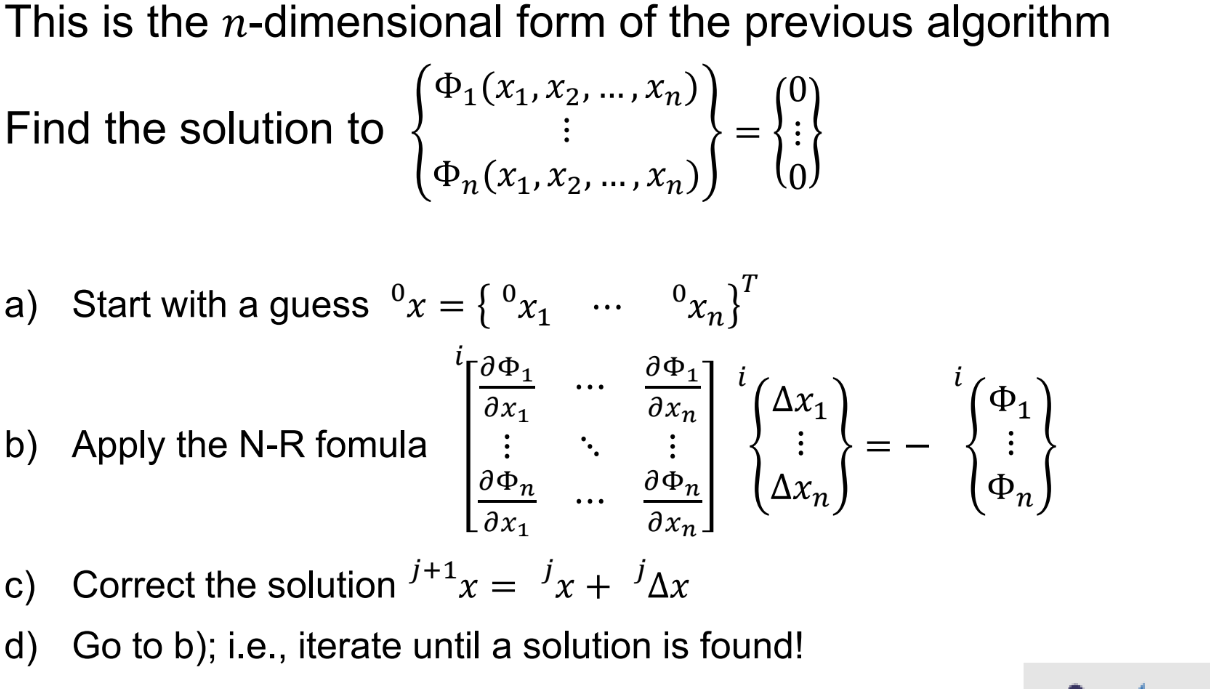
“[Kehrein, Primer for Numerics]”
“[Brandt, 2909 Multibody Dynamics]”