Development
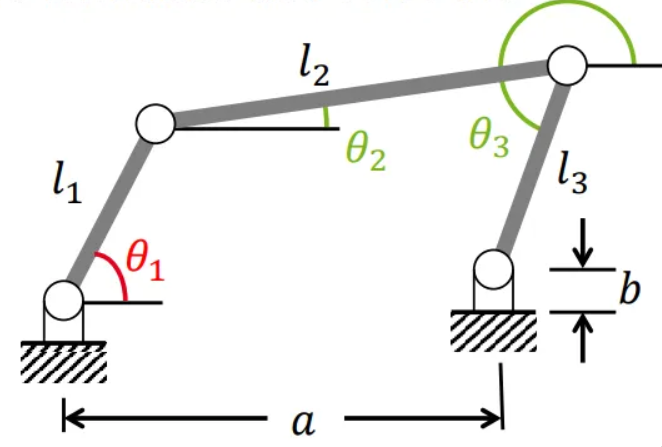
Derived kinematic constraint equations for the classic four bar linkage
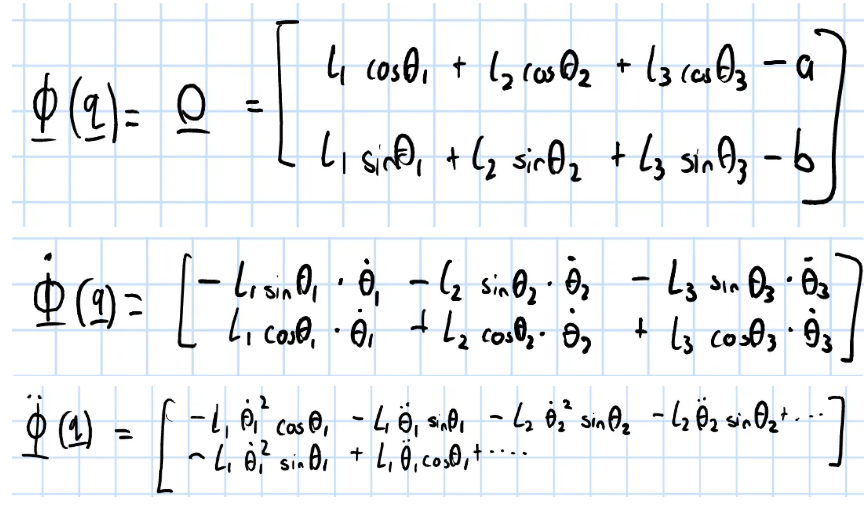
Attempted to solve by hand analytically

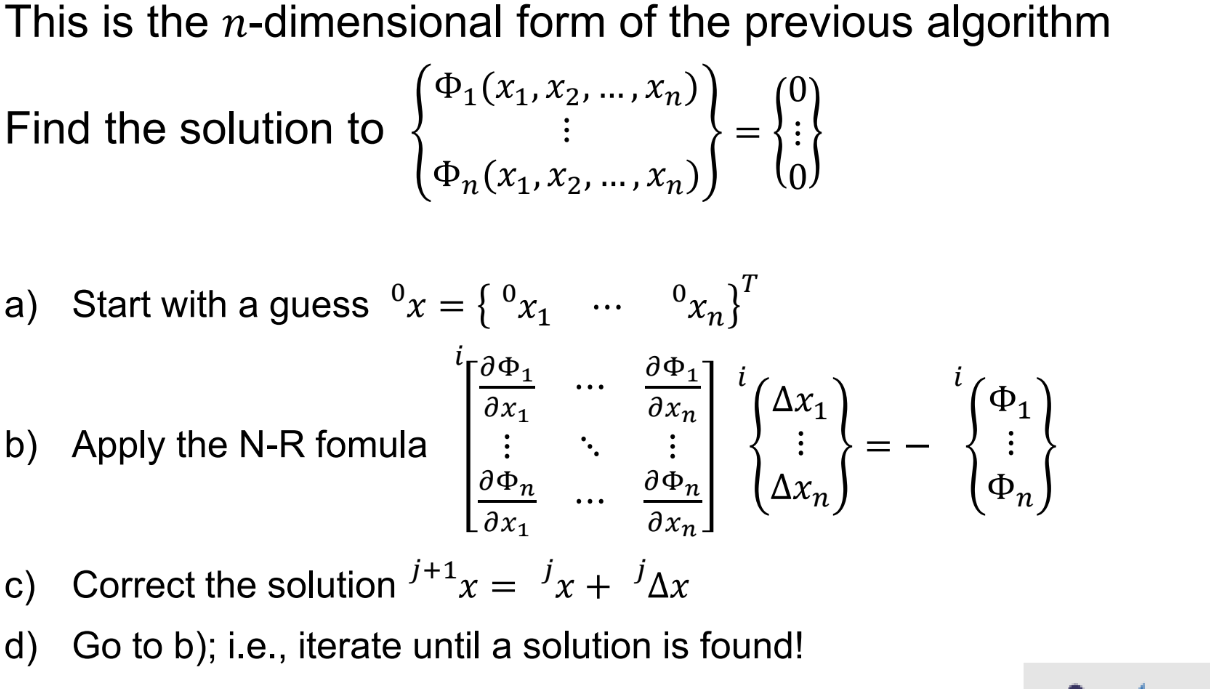
Tried writing Matlab code to solve it by hard Coding NR multivariable method
Code:
%% Parameters
a = 2.0;
b = 0.5;
l1 = 1.0;
l2 = 3.0;
l3 = 2.2;
%% Equations
phi1 = @(O1,O2,O3)(l1*cos(O1)+l2*cos(O2)+l3*cos(O3)-a);
phi2 = @(O1,O2,O3)(l1*sin(O1)+l2*sin(O2)+l3*sin(O3)-b);
phi3 = @(O1,t)(O1-pi/2-2*pi*t);
fO1 = @(t)(pi/2 + 2*pi*t); % function to find O1 at given time t
%% Solving using NR Multivariable method (scratch)
O1 = pi/2; % for t=0 in phi3
theta0 = [O1;0.4;0.6]; % initial guess
theta1 = theta0 - inv(jacobian(theta0(1),theta0(2),theta0(3)))*[phi1(theta0(1),theta0(2),theta0(3));phi2(theta0(1),theta0(2),theta0(3));phi3(theta0(1),0)];
theta1
%% Functions
function [D] = jacobian(O1,O2,O3)
l1 = 1.0;
l2 = 3.0;
l3 = 2.2;
D = [-l1*sin(O1) -l2*sin(O2) -l3*sin(O3);l1*cos(O1) l2*cos(O2) l3*cos(O3);1 0 0];
end
Sources
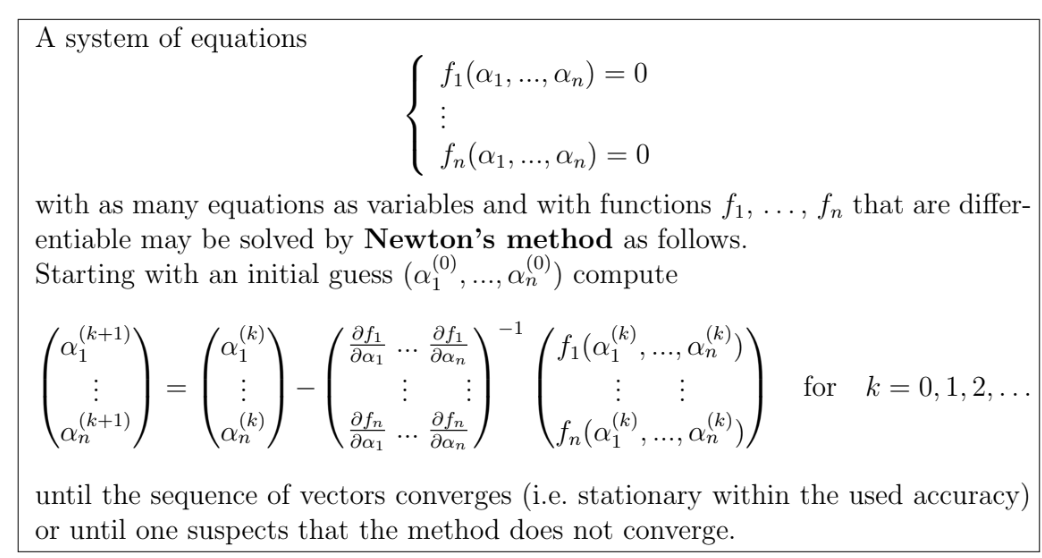
“[Kehrein, Primer for Numerics]”
“[Brandt, 2909 Multibody Dynamics]”