Overview
My work as Student Research Assistant at Hochschule Rhein-Waal was to develop a human-computer chess robotic system where by a human can play chess against a computer in real life using a physical chess board with the robot acting as the medium of the computer. The concept has so far evolved to the goal of creating a system where two people can play remotely, for instance between the two campuses at Hochschule Rhein-Waal. I work under Prof. Dr. Matthias Krauledat and Prof. Dr. Ronny Hartanto. I also worked with a fellow student assistant Praneel Bhatia who did the initial designs and prototyping of the MagBoard.
The project is ongoing, but the primary components of the project are as follows:
Piece Identification System
MagBoard – A Reimagined Chessboard Powered by Magnetic Proximity Sensing
To identify the class and position of the pieces, we desigend a modular 4×4 array of analogue Hall-effect sensors. Each piece is embedded with a magnet and 3D printed spacer configured to give readings within a class range. The design utilized 64 sensors, PLA 3D-printed spacers, and neodymium magnets, with theoretical modeling and validation through 180+ precision measurements using a field strength meter and digital multimeter.
- 🧲 Achieved piece position recognition with ~90% accuracy, and confirmed minimal magnetic interference (<10mT deviation) through structured interference tests.
- 🐍 Built a Python-based backend with python-chess and berserk libraries to sync board states with Li-Chess in real time, operating at 1.3Hz update frequency.
- 💡 Processed sensor data via an Arduino UNO R4 WiFi with an integrated LED matrix, running ADC at 8-bit resolution and 3.3V reference voltage.
- 📊 Proved viable classification of up to 7 piece types within a 2.5mm–10mm spacer range based on flux density variation.
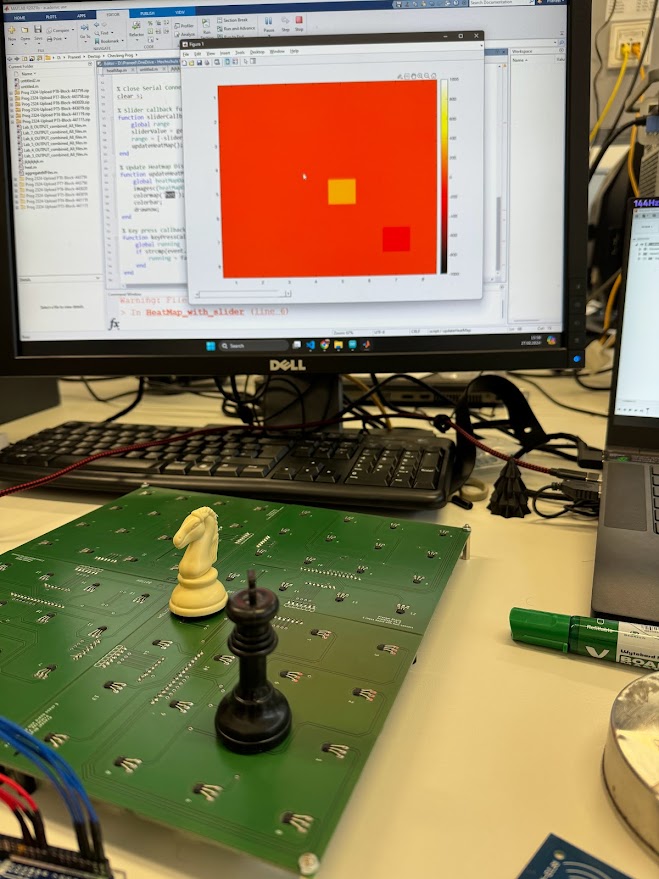

“Showing the basic principle”
Presentation at ICHORA 2025
My mentoring professors, my fellow student research assistant and I presented the current design at The International Congress on Human-Computer Interaction, Optimization, and Robotic Applications (ICHORA) in Turkey in May 2025. The paper was published by IEEE.
For the paper, I researched and designed the experiments to investigate the magnetic flux densities at different distances. I also performed the interference tests. I wrote the sections on Design and Implementation, Results and Discussion and Conclusion.


“Images from ICHORA 2025”
Digital Chess Communication (WIP)
The board will also communicate via Python script to Li-Chess where the two players will connect and essentially play against each other. The goal is to have the virtual board mirror the physical one.
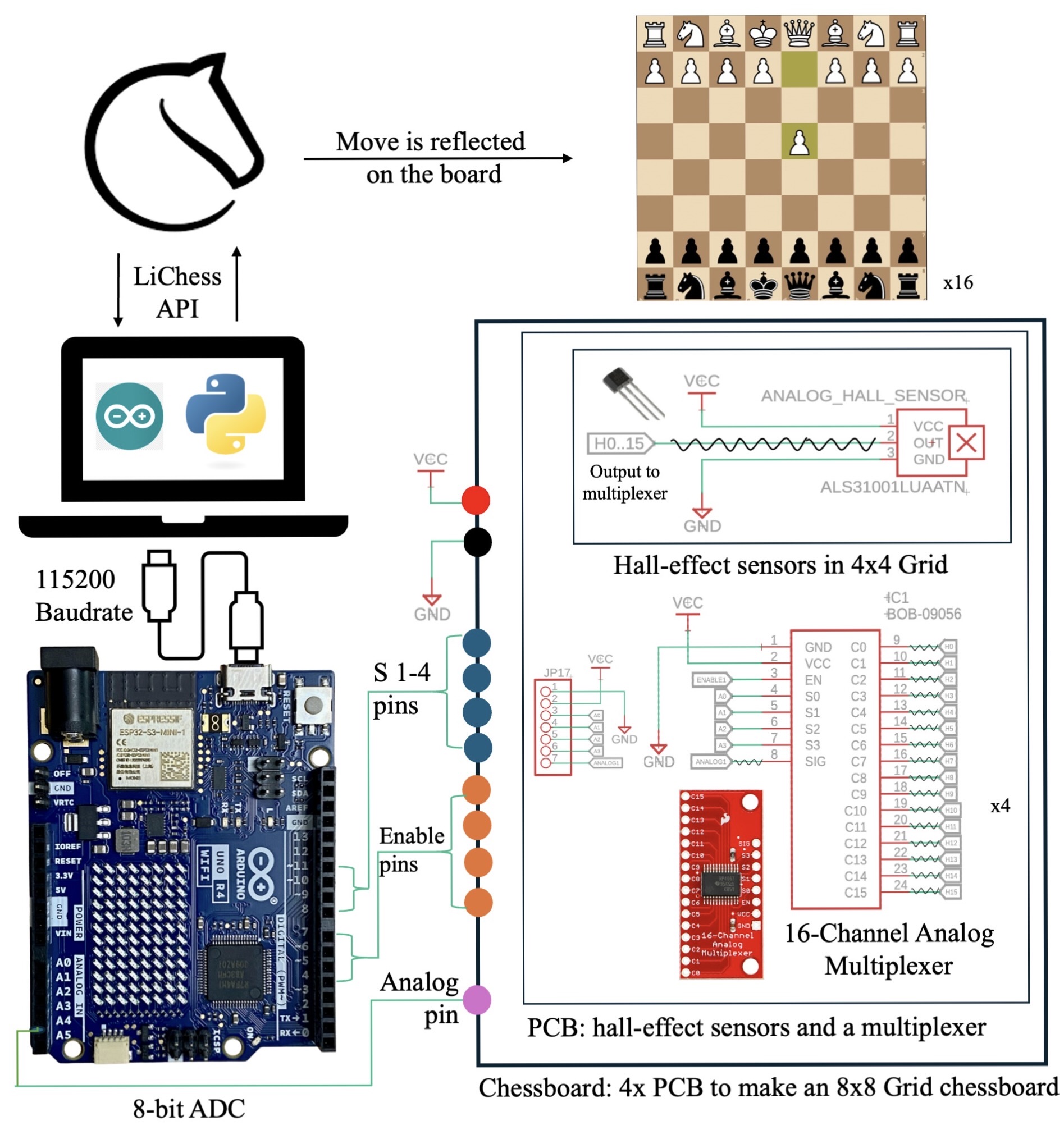
“System diagram illustrating process flow”
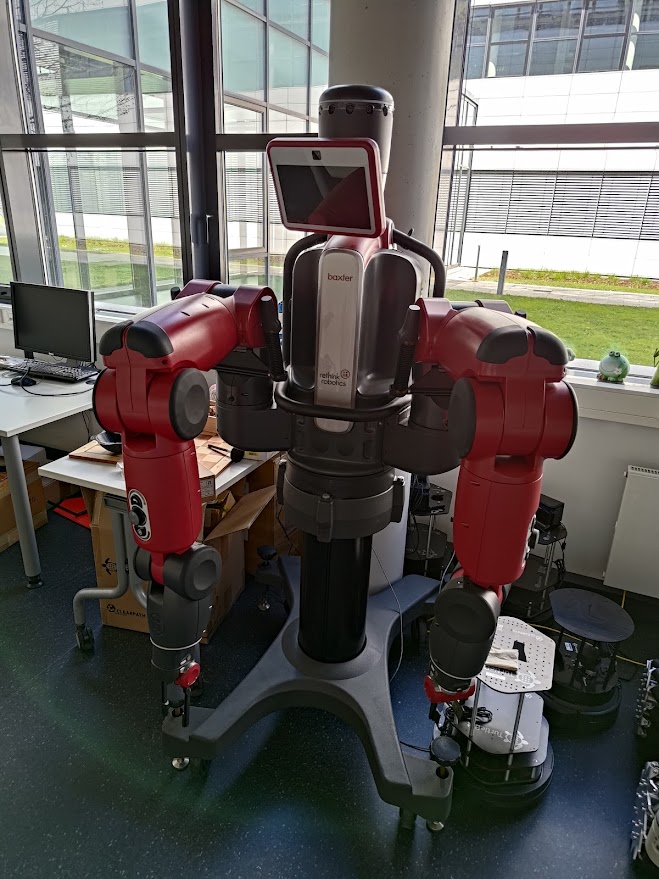
Robotic Player (WIP)
Finally, the moves made on Li-Chess can be communicated to a robotic player and it will make the move in real-life.
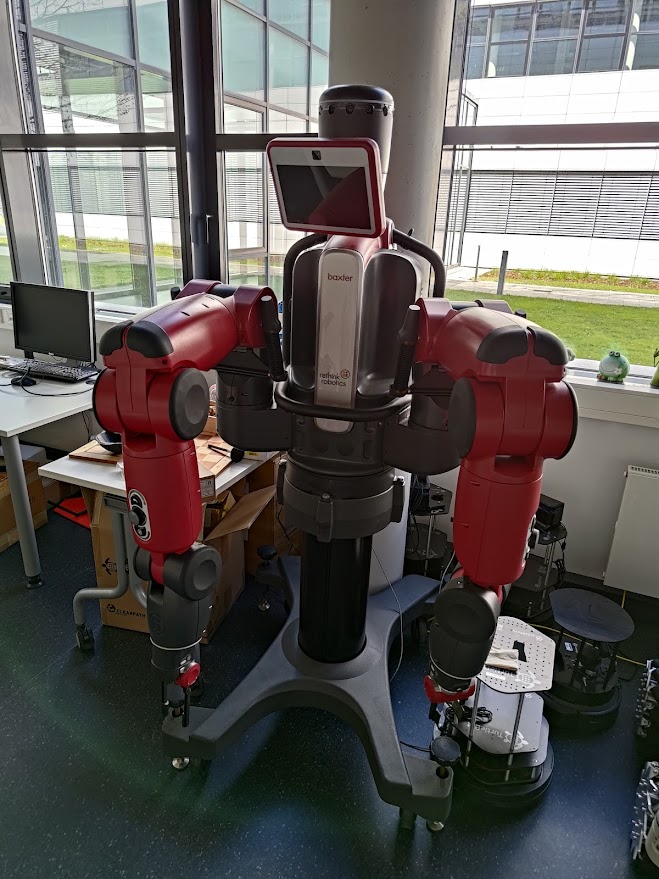

“Some robots we have at Hochschule Rhein-Waal”