Overview
I want to build a simple robotic car that detect obstacles and follow a given path or coordinates.
🔧 Current Features
- Motors controlled by LP298 Motor Driver
- Emergency stop triggered by ultrasonic sensor
- ROS 2 access point ready for programming
📦 Requirements
- Arduino
- Robotic Car 4WD Chassis Kit with Motors
- LP298 Motor Drivers
- Ultrasonic sensor (comptabile with Arduino)
- Sufficient Power (5V for Arduino and 5-12V for the Motors)
- Breadboard
🚧 Future Work
- Wireless connection to computer via Arduino R4 Uno Wifi capabilities
- 3D printed Chassis design to fit and support all components
- Using ROS 2 to enable communication between robotic components
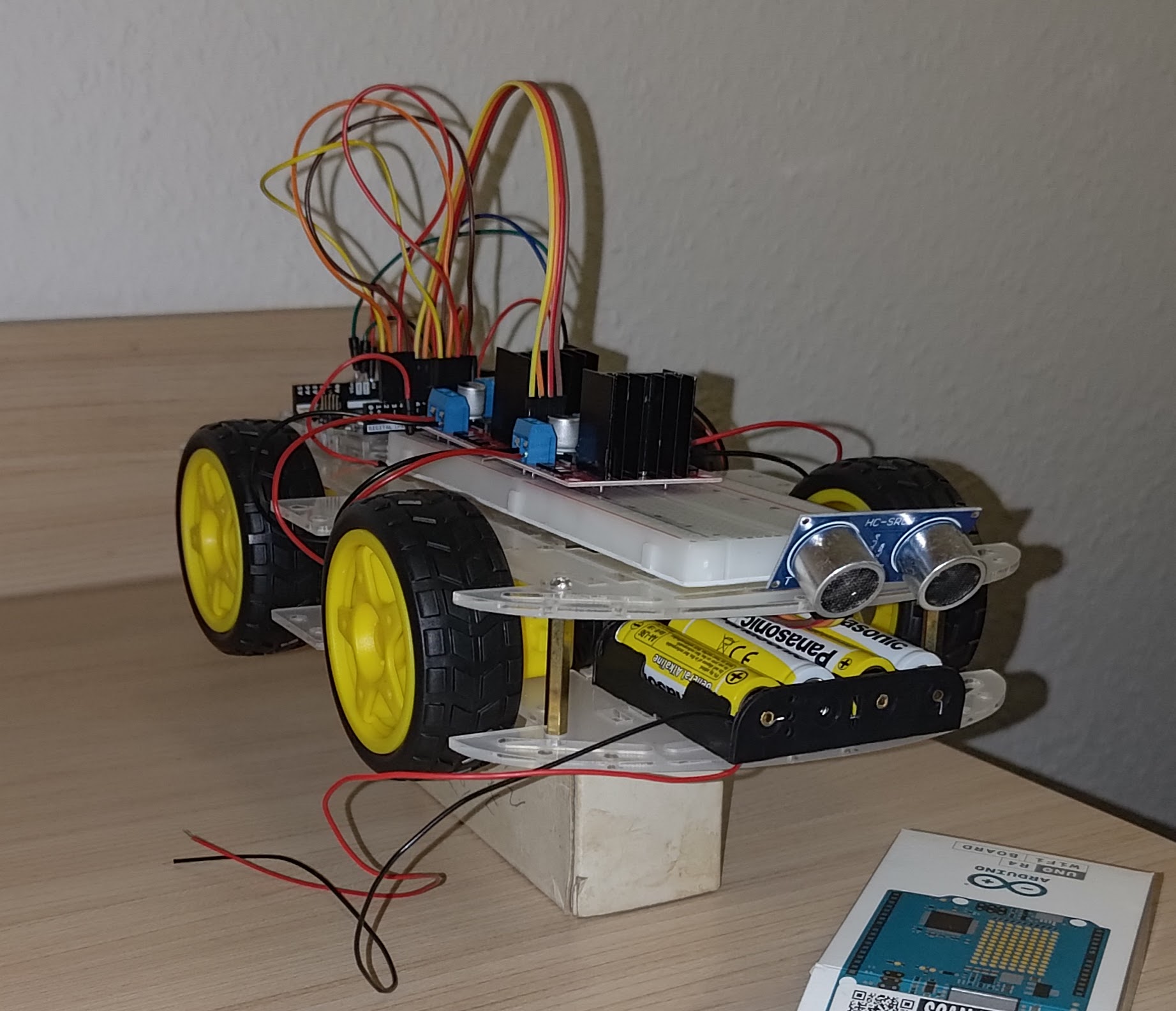
RobCar V1.0
Emergency Stop
So far I have assembled the chassis and connected the motors, motor drivers and ultrasonic sensors to create a simple robotic car that drives forward and stops when it reaches an obstacle.
While not very impressive so far, it is the first steps in building this project. It shows that the drivers, sensor and motors are all working correctly with the Arduino.