Projects
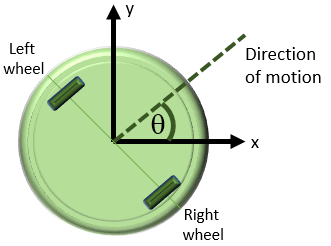
Autonomous Robot Simulations
Developing a special purpose simulation of an autonomous robot moving along the floor.
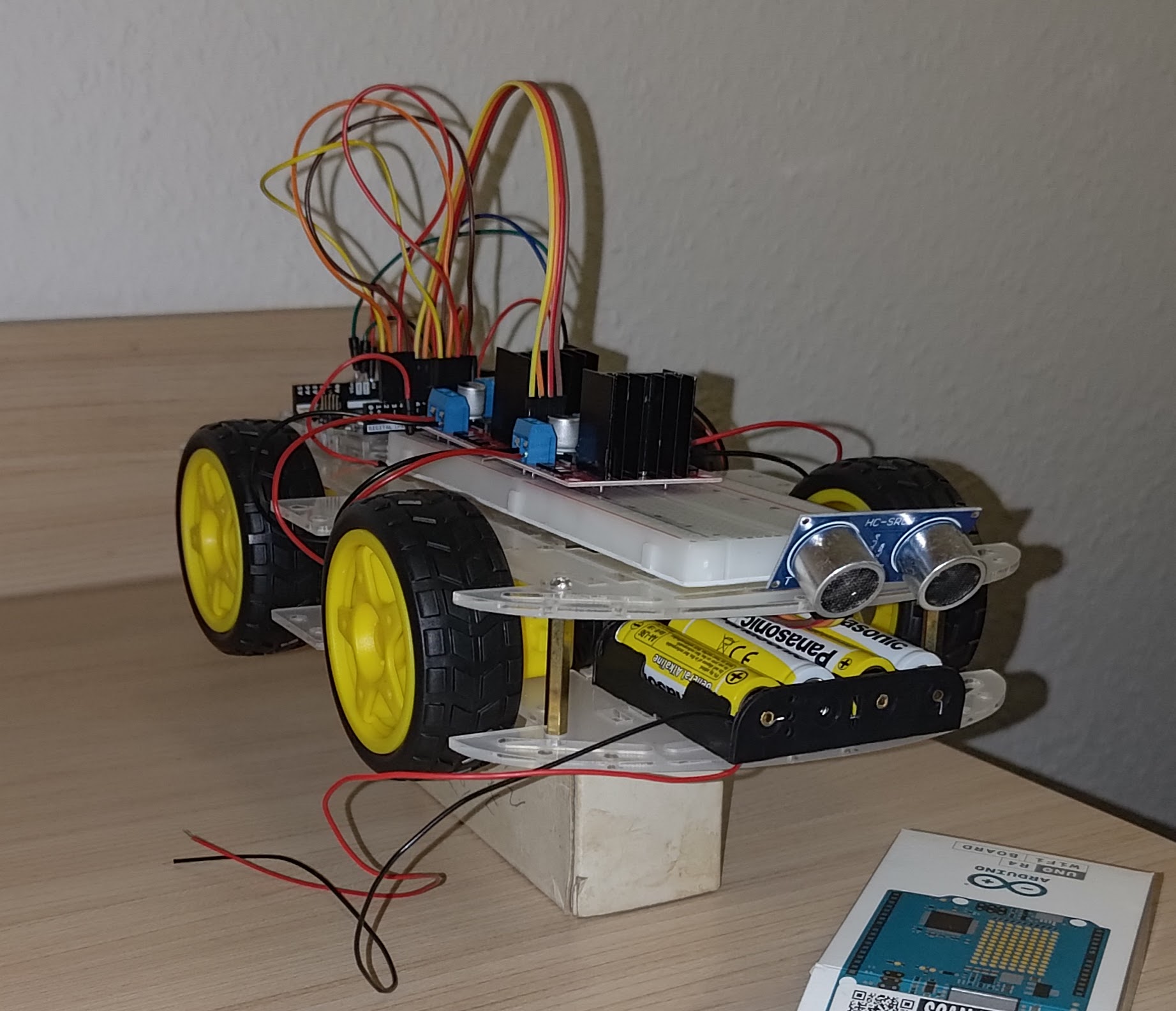
Autonomous Robotic Car
Building a small autonomous robotic car that an detect obstacles.
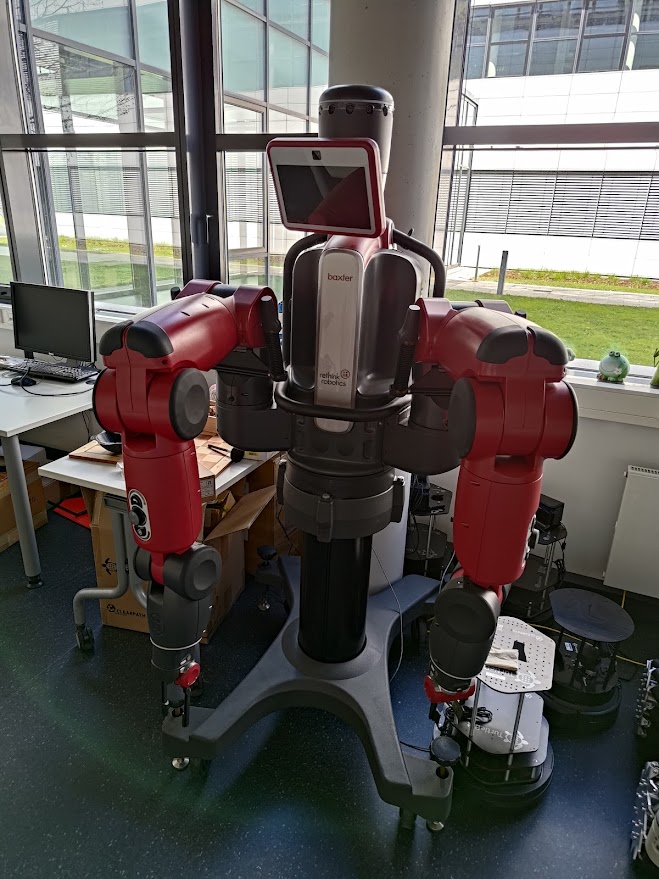
Chess Playing Robot
Designing a synchronous robotic system where two people can play chess against each other remotely using robots.
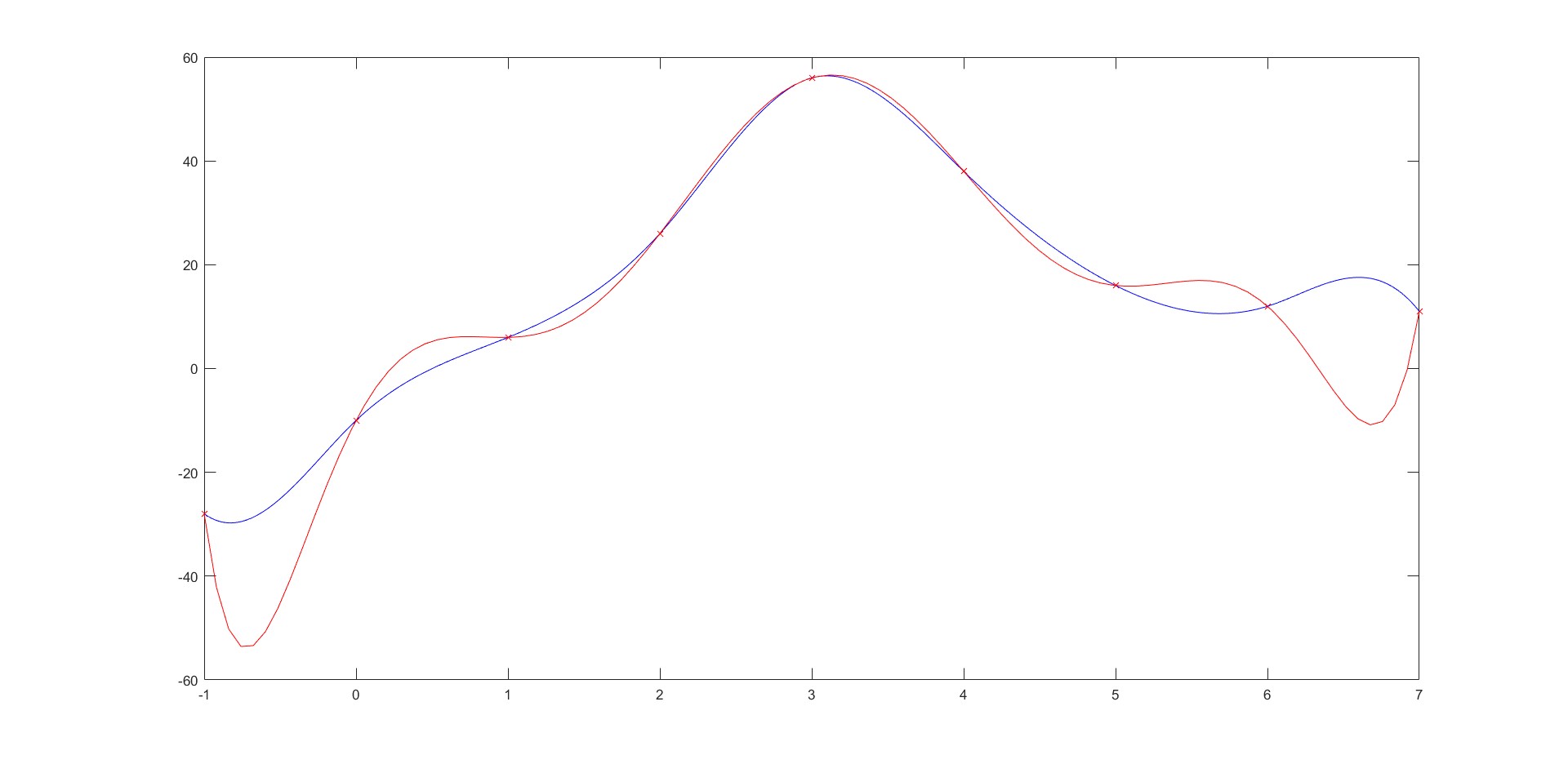
Interpolation Calculator
Designing a automatic calculator which can calculate and plot the cubic splines and interpolated polynomials of a given set of univariate data.
The Knock Lock
Designing and implementing a lockbox which unlocks when user knocks in a specific pattern.
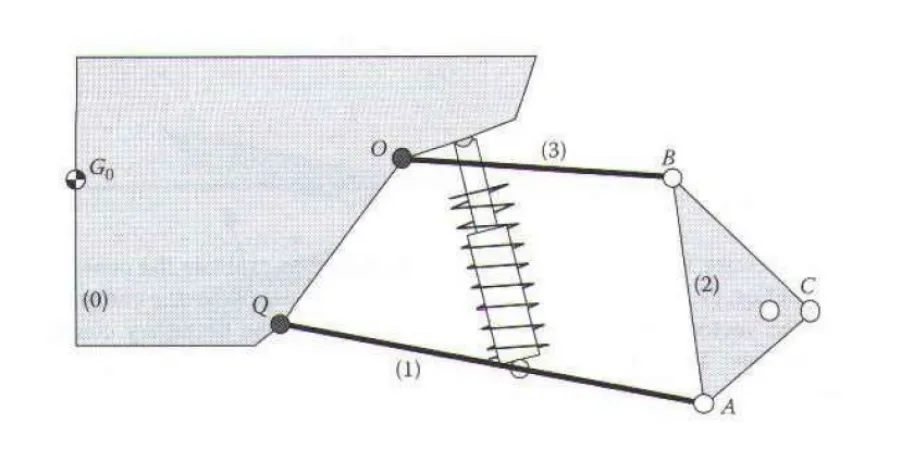
Planar Multibody Dynamics Simulations
Creating a general purpose simulation software for planar multibody dynamics in MATLAB.
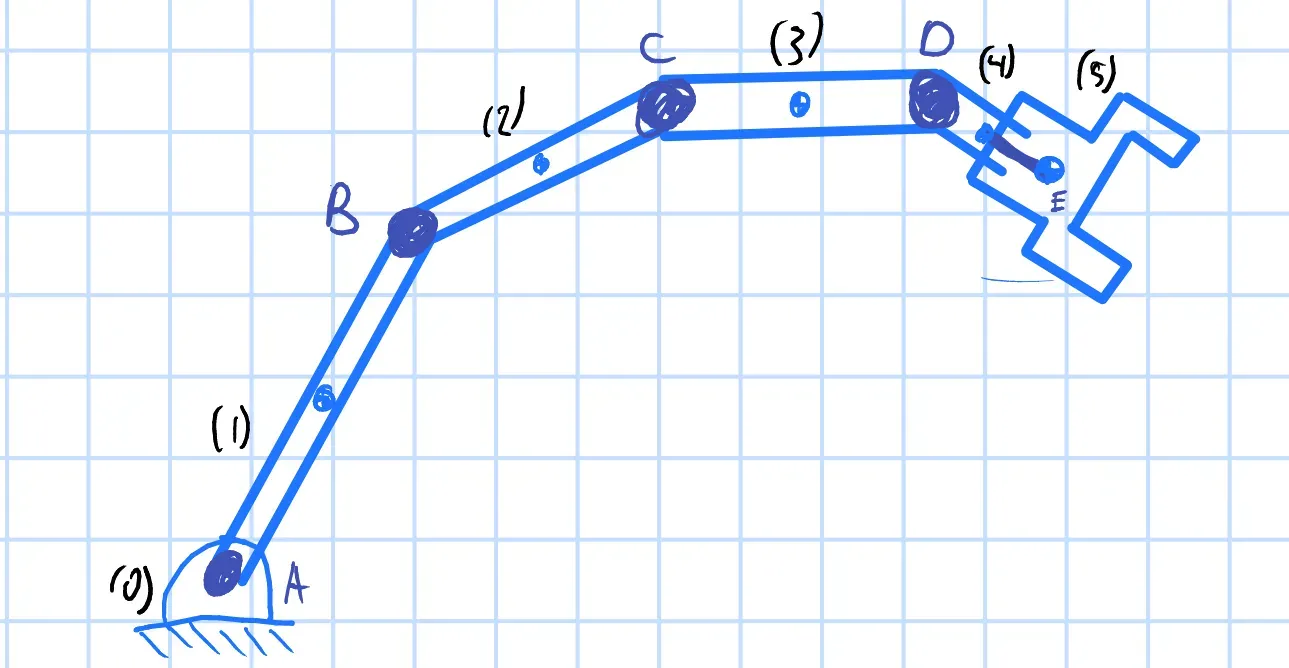
Robotic Simulations (WIP)
Developing basic simulations for a robotic arm in both 2D and 3D.
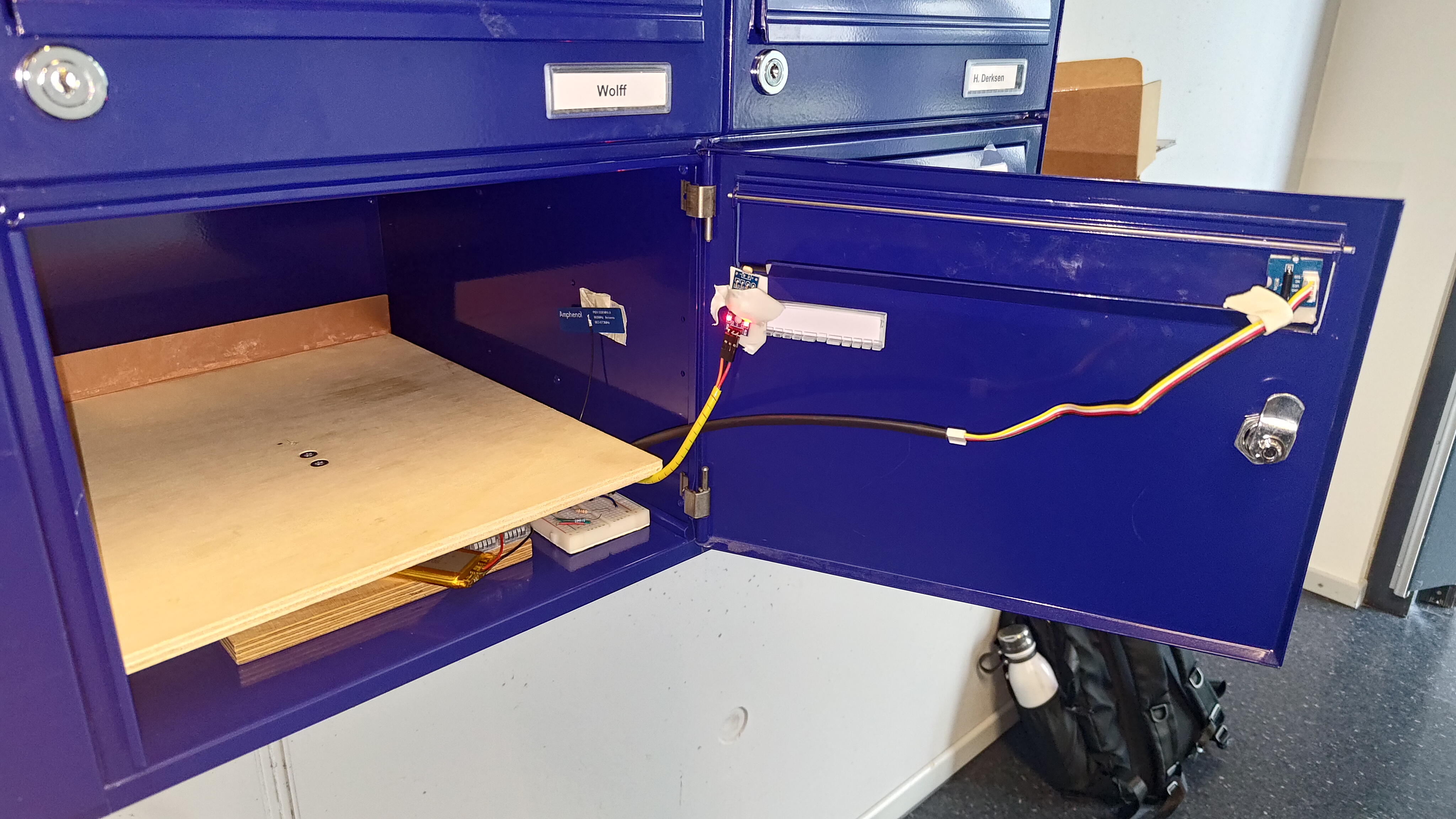
The Talking Mailbox
Designing and implementing a mailbox that can detect the presence of mail and email user.
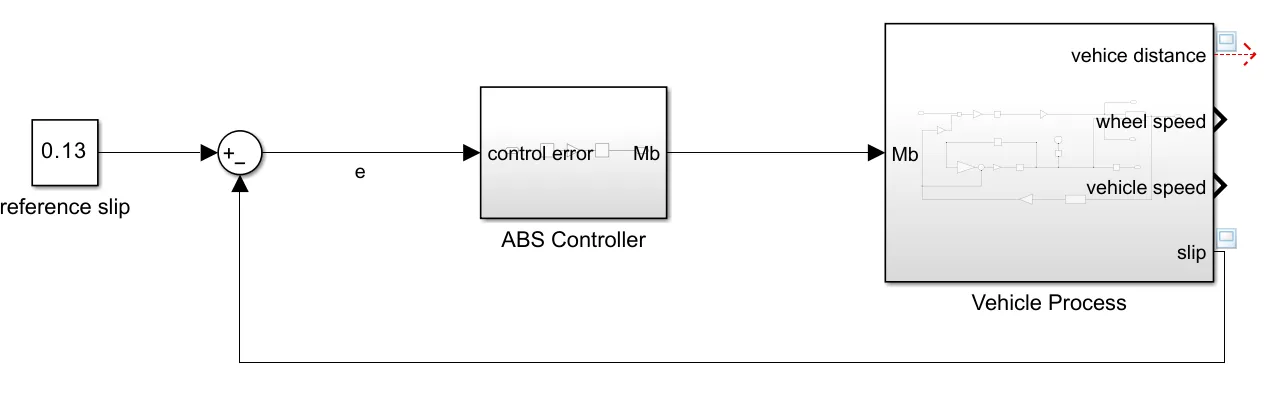
Vehicle Dynamics Simulations
Developing a set of simulations for vehicle dynamics in different directions.

The Verificatinator 3000
Design for a mobile force verification unit (only concept, no implementation).